| Espacio Vectorial | Espacio Proyectivo |
| [$\mathbb{R}^2$] | [$P(\mathbb{R})$] |
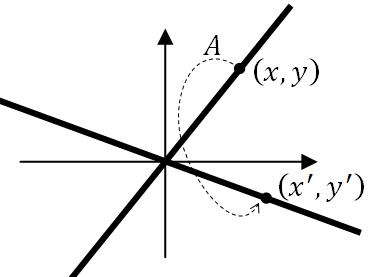
| Los elementos de [$\mathbb{R}^2$], en coordenadas cartesianas, son pares de números reales [$(x,y)$] que representan puntos. | Los elementos de [$P(\mathbb{R})$], en coordenadas homogéneas, son pares de números reales [$(x,y)$] que representan rectas que pasan por el origen. |
 |  |
| Dos puntos [$P=(x,y)$] y [$P'=(x',y')$] son iguales si y sólo si [$$x=x',\ y=y'$$] y lo escribiremos [$P=P'$]. | Dos puntos [$P=(x,y)$] y [$P'=(x',y')$] están en la misma recta si y sólo si existe un [$k\in\mathbb{R}$] tal que [$$x=kx',\ y=ky'$$] y lo escribiremos [$P\equiv P'$]. |
| [$$\mathbb{R}^2=\{(x,y)∣x,y\in\mathbb{R}\}$$] | [$$P(\mathbb{R})=(\mathbb{R}^2-\{(0,0)\})/\equiv $$] Si [$x=y=0$] no tenemos una recta por eso se ha excluido el punto [$(0,0)$] que no forma una recta. |
| Cada punto tiene dos grados de libertad, la abscisa [$x$] y la ordenada [$y$]. | Cada recta sólo tiene un grado de libertad. La equivalencia entre rectas [$\equiv$] le quita un grado de libertad a [$(x,y)$] (precisamente, es el valor de [$k$] que hemos de hallar). |
| Usar una matriz para transformar puntos en otros genera aplicaciones lineales. [$$P'=AP$$] | Usar una matriz para transformar rectas en otras genera colineaciones. [$$P'≡AP$$] Es decir, existe un [$k\in\mathbb{R}$] tal que [$$P'=kAP$$] |
| Una matriz tiene cuatro grados de libertad cuando representa una aplicación lineal. | Una matriz tiene tres grados de libertad cuando representa una colineación. |
 |  |
| Si la matriz es regular (no singular, con determinante no nulo), la transformación lineal es invertible. | Si la matriz es regular, la colineación se denomina homografía y representa proyecciones cónicas. |
| Al ser invertible forma un grupo. Concretamente el [$GL(2,\mathbb{R})$]. | Al ser invertible forma un grupo. Concretamente el [$PGL(2,\mathbb{R})$]. |
Es posible y deseable normalizar los puntos. Una forma de hacerlo es elegir de cada recta el punto cuya última coordenada sea uno. En este caso [$y=1$]. [$$(x,y)≡k(x,y)=\frac{1}{y}(x,y)=(\frac{x}{y},1)$$] | |
Se comprueba con facilidad que esta normalización es una proyección perspectiva donde la línea [$y=1$] es el plano de proyección.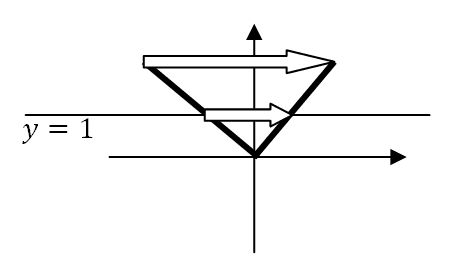 | |
| Todo esto se puede extender a 3 dimensiones usando [$\mathbb{R}^3$]. | Todo esto se puede extender de proyectar en una línea en [$P(\mathbb{R})$] a proyectar en un plano en [$P^2(\mathbb{R})$]. Este plano sería, por ejemplo, la pantalla del monitor o el CCD de una cámara. |
jueves, 26 de mayo de 2011
Espacios proyectivos
Suscribirse a:
Enviar comentarios (Atom)

0 comentarios:
Publicar un comentario